Open call for curiosity research at AstaZero: Tests from the project “Traction adaptive motion planning for critical situations” now finalised
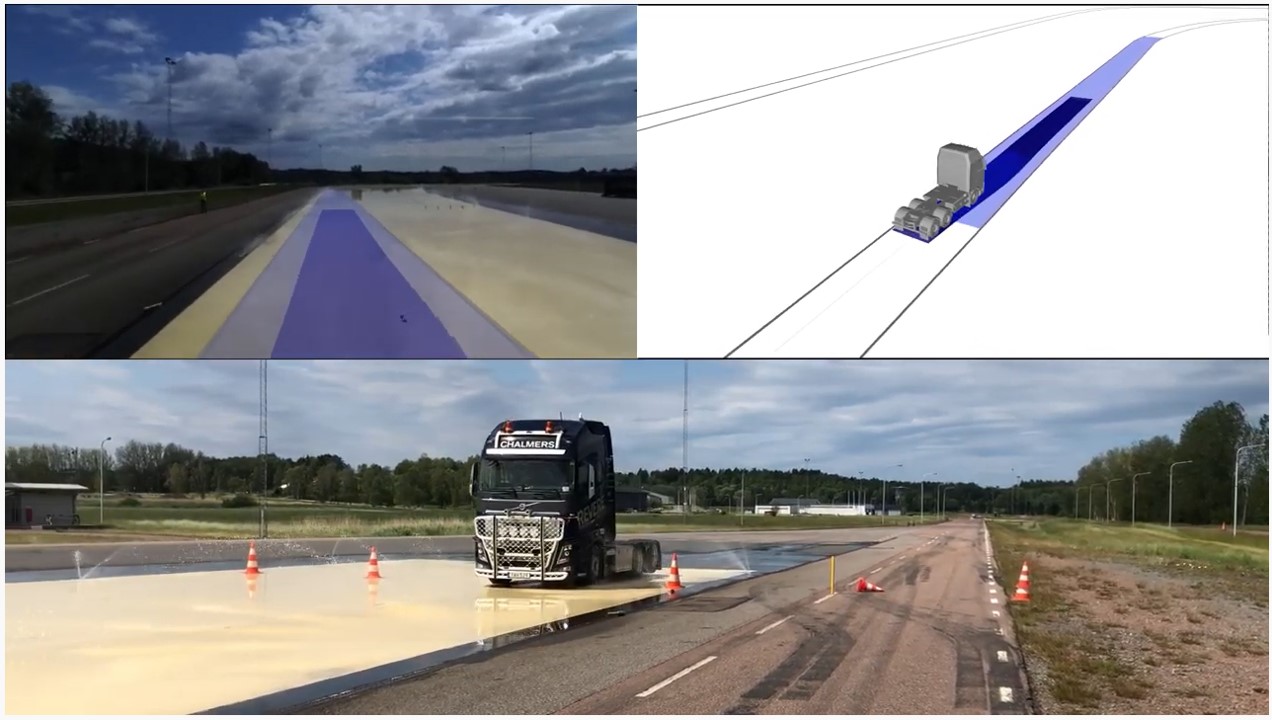
The researchers have now completed the first set of tests of traction adaptive motion planning in critical situations. In the test shown in the video they evaluated the concept for collision avoidance of suddenly appearing obstacles at slippery road conditions. The project is a collaboration between researchers from KTH, Chalmers and UC Berkeley and is funded by the Open call for research at AstaZero, coordinated by SAFER.
The goal of this project is experimental validation of our research in algorithms for traction adaptive motion planning of automated vehicles. The traffic environment is inherently uncertain and unpredictable. In both automated and non-automated driving, unforeseen critical events will inevitably occur due to sensory limitations and unpredictable behavior of other road users. In critical scenarios, passenger comfort is not a priority, and therefore, the full physical capacity of vehicle can be used to avoid or mitigate an accident. However, the motion capabilities of a vehicle varies with the operational conditions, motivating our research topic. In this project the researchers wanted to investigate to what extent traction adaptive motion planning can improve the vehicle's capacity to avoid accidents in critical scenarios.
Results and effects
The initial simulation study indicates that adapting motion planning and control functionality to the current traction conditions will significantly reduce the probability that a critical situation results in an accident, https://arxiv.org/abs/1903.04240. The improvement is twofold:
1. When traction is better than anticipated, we see a distinct improvement in the capacity to avoid collision with the obstacle. The reason is that the vehicle utilizes more of the available tire force to avoid the obstacle.
2. When traction is worse than anticipated, we see a reduction in cases where the vehicle loses control as a result of the evasive maneuver. The reason is that without traction adaptation, the planned motion cannot be realized by the vehicle, resulting in saturated tires and loss of control.
If properly verified and disseminated, these findings have potential of improving performance of AD and ADAS functionality, which in turn may reduce traffic fatalities in the future.
Test design and procedure
To validate our method we are planning two experiments at the Asta Zero High Speed Area. The tests represent two examples of critical scenarios in which we will compare performance between the traction adaptive and non-adaptive versions of the algorithm.
Experiment 1: Pop-up obstacle avoidance:
The vehicle drives along a section of road at a predetermined initial velocity (e.g. 50km/h). A simulated obstacle pops up at a predetermined position in the vehicle path. The objective of the algorithm is to avoid collision and come to a stop. The experiment will be repeated for high and low traction conditions.
Experiment 2: Turn with deteriorated traction
The vehicle approaches a sharp curve at a predetermined target velocity (e.g. 50km/h). The second half of the curve has deteriorated traction conditions. The goal of the algorithm is to safely negotiate the turn.
Do you want to perform tests at AstaZero yourself? We have an open call now: https://www.saferresearch.com/news/last-call-open-research-astazero-project-proposals-2020