Motion-by-Wire
Full title: Enhancing safety of automated electric vehicles through Motion-by-Wire
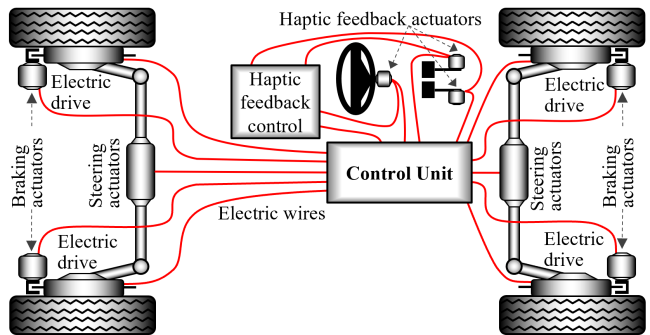
This project aims to improve the road safety of automated electric vehicles, both cars and trucks, by developing a comprehensive motion-by-wire (MBW) system that integrates multiple driving actuators, brake-by-wire, and steer-by-wire technologies. Advanced control algorithms will be designed to enable Level 4 autonomous driving through real-time optimization of motion planning and actuator coordination. The system will be validated on prototype vehicles, including a Volvo car with in-wheel motors and a Volvo truck with close-to-wheel motors. A key focus is on ensuring fail-operational capabilities, allowing continued control despite X-by-wire system failures.
Traffic safety benefit: Improved maneuverability that allows the vehicle to execute rapid, controlled evasive maneuvers, reducing the likelihood of collisions in near-crash situations. Maintaining controllability in the event of a steering actuator failure through differential drive-assisted steering and yaw-moment control.
Key words: Safe automated vehicles, optimal control, fail-safe control