Project portfolio

Drive Safe at Work
Full title: Drive Safe at Work – Strategies to Improve Employee Driving Behavior The project focuses on occupational safety and addresses the issue of traffic accidents involving employees who drive as part of their job but
Mandatory Alcohol Interlocks
Full title: Mandatory Alcohol Interlocks in the EU – A Knowledge Base for Advancing the Process Drivers under the influence of alcohol continue to pose a major road safety problem, and mandatory alcohol interlocks have
SÄKMAT
Full title: Traffic safety effects of platform-based food deliveries on cycle paths Swedish title: Trafiksäkerhetseffekter av plattformsbaserade matleveranser på cykelvägar According to current regulations, class II moped
EXPLORING REMOTE OPERATION LANDSCAPE
In recent years, there have been several deployments of autonomous vehicles (AVs) on public roads as robotaxi services, where the operation of the robotaxis is often supported by remote operations to ensure safe and efficient
WHAT DOES IT COST?
At the Swedish Traffic Safety Days arranged by SAFER on October 21st 2025, it was several times mentioned how important it is to count on things. In Analys av trafiksäkerhetsutvecklingen 2024, the Swedish Transport
RIMKOT
Full Title: Risk Analysis as a Method to measure Consequences for not investing in Traffic Safety Swedish Title: RIskanalyssomMetod att mäta KOnsekvenser av inte arbeta med Trafiksäkerhet By applying established risk
VERSACE
Full title: Verification Strategies and Safety Assurance of Continuously Evolving Automated Driving Systems VerSACE develops new ways to verify and assure safety for automated driving systems that are updated frequently
Speed Monitoring in Organizational Operations
Swedish title: Hastighetsuppföljning i verksamheter – datadrivet projekt utifrån ett kommunperspektiv This project is based on the Swedish Transport Administration’s work on Sustainable Speeds and other studies on how
INSIGHT
Full title: Impairment Navigation through Systematic Investigation & Glance Habit Tracking The INSIGHT project aims to enhance road safety by developing a sophisticated system to detect driver impairment in real-time. The
PRE LSDEMO
Full title: Large Scale Demo for automated driving – CSA project This project sets the scene for the upcoming large scale demonstration project to be submitted Oct 2026. Key components: methodology and evaluation toolkit
Test Method for Hip Impact
Swedish title: Provmetod för höftislag Approximately 15,000–18,000 people suffer hip fractures annually in Sweden, mainly women (75%) and the elderly. Hip protectors have been on the market since the 1990s, but still lack
Joint efforts to increase bicycle helmet use
Swedish title: Kraftsamling för ökad cykelhjälmsanvändning Joint effort to increase bicycle helmet use brings together and mobilises organisations across Sweden to raise helmet use, especially in environments where children
Interoperable RSU
Full title: Interoperable Roadside Unit (RSU) Prototype This project builds directly upon the company’s previously successful Vinnova funded pre-study, "Safer Crossways using I2V," aiming to enhance traffic safety innovations
I-AIMS2
Full title: Impairment-Aware Intelligent Mobility System 2 In collaboration with SmartEye AB, the I-AIMS2 project explores how driver safety, well-being, and fuel efficiency can be improved by monitoring the driver and using
DIME
Full title: Driver Impairment Multimodal Evaluation The Driver Impairment Multimodal Evaluation (DIME) project addresses the challenge of identifying intoxication, particularly when drivers attempt to conceal it. This will be
CCAMbassador
Full title: Connected, Cooperative and Automated MoBility Assessment & Stakeholder Dedicated and Operational awareness Raising CCAMbassador complements the coordination and alignment efforts of the CCAM Partnership by
SAFE-FM
Full title: Safety-Enhanced and Physics-Informed Foundation Models of Vehicle Behavior This project develops physics-informed AI foundation models to enhance safety validation in automated vehicles. By embedding physical
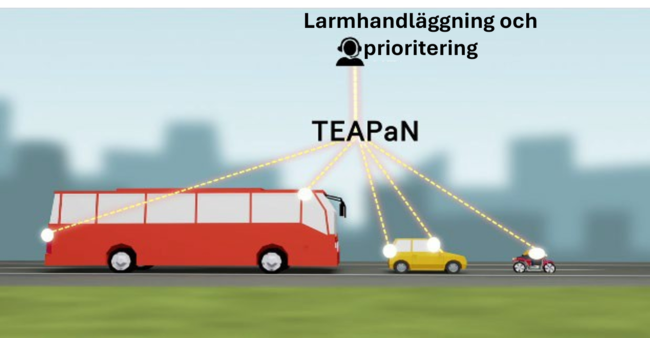
Equal Safety for the Whole Population of Powered Two-Wheeler Riders
Powered two- and three-wheelers (PTWs), represent a compact mode of transportation whose global numbers nearly tripled between 2011 and 2020. This was, however, also accompanied by a 30% increase in fatalities, in contrast to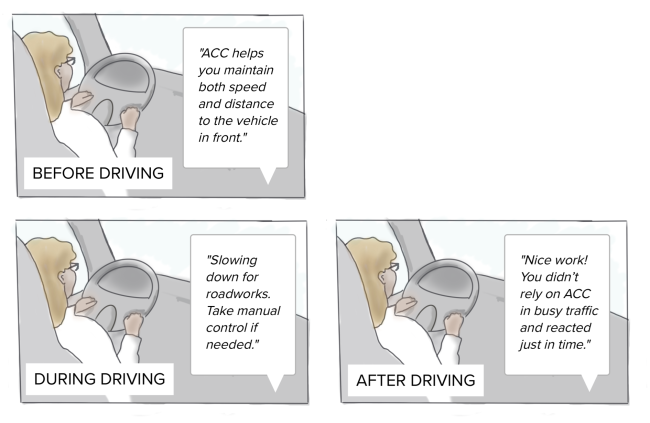
ConAI
Full title: ConAI: AI-based conversational agents that support drivers' understanding of ADAS and enhance traffic safety Summary: Many truck drivers struggle to understand and use Advanced Driver Assistance Systems (ADAS, SAE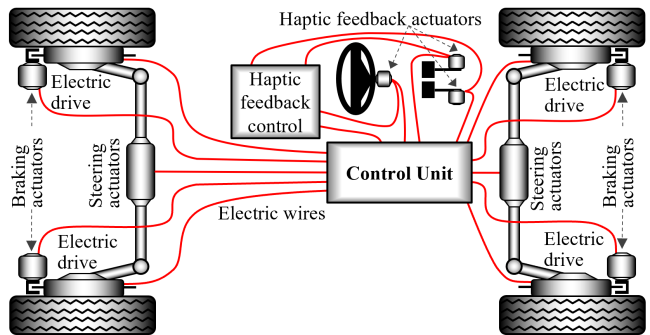
Motion-by-Wire
Full title: Enhancing safety of automated electric vehicles through Motion-by-Wire This project aims to improve the road safety of automated electric vehicles, both cars and trucks, by developing a comprehensive motion-by