
Project portfolio

ROSCITS
Full title: Robust and safe implementation of C-ITS This project aims to enable a robust and secure national rollout of Cooperative Intelligent Transport Systems (C-ITS) in Sweden by developing a shared vision, validation
COMCY
Full title: Comfortable Overtaking of Cyclists on Rural Roads The goal of ComCy is safer and improved overtaking behaviour on rural roads, with the vision of making rural roads more accessible for cycling and other active
IMPROVA
Full title: Injury Mitigation to PROmote Vision-zero Achievement Until now, the approach to road safety has primarily focused on analyzing the most common types of injuries based on road user types and crash characteristics
Trafiksäkerhetslyftet
Full title: Systematic traffic safety implementation at the local level: Trafiksäkerhetslyftet and traffic safety culture in Swedish municipalities Implementation at the local level is crucial for the development of traffic
STIG
Full title: Smart Technology for Innovative Data Collection and Analysis for Pedestrian and Bicycle Paths STIG develops an AI method for efficient data collection and analysis of pedestrian/bicycle paths, creating a cost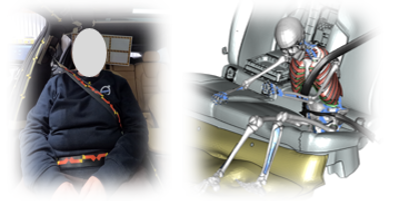
Safe and comfortable seat belts for all
To promote safe, equal, and sustainable road transport with varying degrees of automation today and in the future, this project will produce novel data on car passengers’ sitting postures, belt fit, and comfort experience and
TADDO 2
Full title: Trustworthy Automated Driving DevOps The main goal of the TADDO2 project is to develop methodologies and a framework for trustworthy DevOps for automated vehicles. This is to enable a faster transition to
EVOROADS
Full title: Evolutionary Solutions for Realising a Holistic Safe System Approach for All Road Users The successful implementation of EU’s 2021-2030 road safety policy is a milestone towards the target of zero fatalities in
PREKO 2
Full title: Proactive assessment of cognitive work environment in ambulance healthcare (Proaktiv bedömning av kognitiv arbetsmiljö i ambulanssjukvården) This project intends to improve the conditions for understanding and
TWIN-SAFE
Full title: Advancing Road Safety through Twinning The TWINSAFE project aims to enhance road safety research capabilities at the University of Zagreb, Faculty of Transport and Traffic Sciences (FTTS) by fosteringSYNERGIES
Full title: Real and synthetic scenarios generated for the development, training, virtual testing and validation of CCAM systems The main goal of Synergies is to fully enable development, training, virtual testing and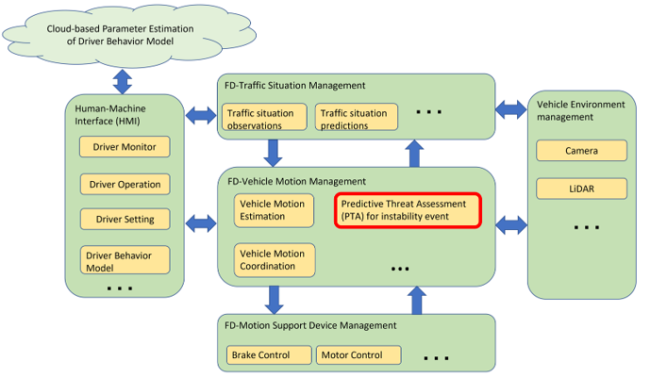
PREDICTIVE THREAT ASSESSMENT FOR ENHANCED STABILITY OF MULTI-UNIT HEAVY VEHICLES
The objective of this research project is to improve the effectiveness of Advanced Driver Assistance Systems (ADAS) for Multi-Unit Heavy Vehicles (MHVs), by providing them with tools that enable earlier, more effective, and
FAMER
Full title: Facilitating Multi-Party Engineering of Requirements Abstract: FAMER will establish concepts, models, and techniques of effectively building requirements knowledge for safe perception systems. FAMER approaches the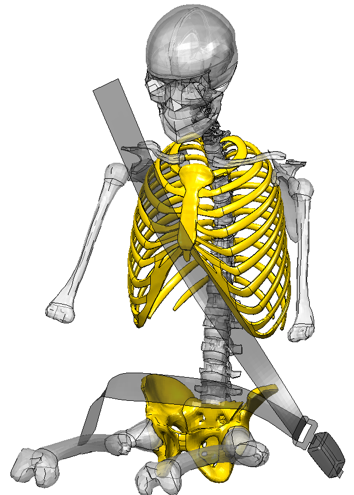
Injury HBM, step 5
Full title: Enhancing Female and Male SAFER HBM Torso Injury Prediction (I-HBM V) Abstract: Expecting a greater variation in occupant sitting postures and activities in future vehicles, continued development of occupant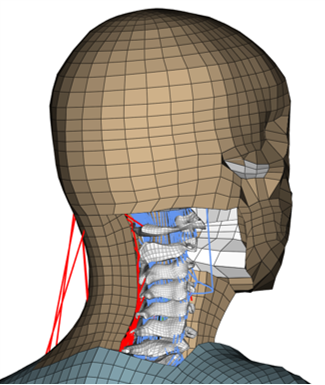
SAFER HBM Neck Injury Prediction
Full title: Advancing Neck Injury Prediction in Car Crashes using the SAFER HBM Abstract: The cervical spine (neck) is a complex body region that can be exposed to a variety of injury consequences, ranging from high severity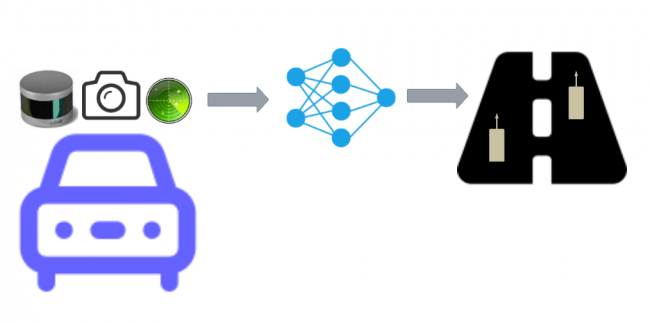
DEEP MULTIMODAL LEARNING FOR AUTOMOTIVE APPLICATIONS
This project aims to create multimodal sensor fusion methods for advanced and robust automotive perception systems. The project will focus on three key areas: (1) Develop multimodal fusion architectures and representations
REALLOCATE - Rethinking how we move
REALLOCATE transforms streets into inclusive, green, safe and future-proof urban spaces, where communities live and thrive. The project enables researchers, mobility experts, urban planners and local citizens to collectively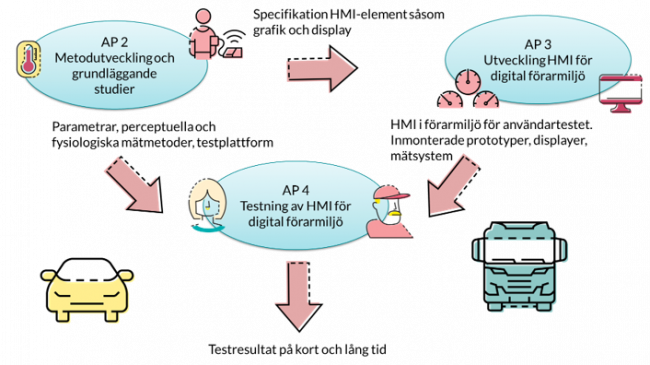
SCREENS II
Full title: Safe chauffeurs in safe and healthy multimodal driver information environments The Screens II project aims to improve traffic safety by addressing the challenges posed by increased automation in the driver’s
SUperSAFE
Full title: SUrrogate measures for SAFE autonomous and connected mobility SUperSAFE ‘SUrrogate measures for SAFE autonomous and connected mobility’ will address the problem of the safety evaluation of the interaction between
ROADVIEW
Fill title: Robust Automated Driving in Extreme Weather ROADVIEW is an EU-funded Horizon Europe Innovation Action aiming to develop robust and cost-efficient in-vehicle perception and decision-making systems for connected and